Terra Drone株式会社(本社:東京都渋谷区、代表:徳重 徹、以下 テラドローン)は、国立研究開発法人宇宙航空研究開発機構(以下、JAXA)等と共同で、2025年日本国際博覧会(以下「大阪・関西万博」)の実環境を活用し、有人機・無人機を用いて安全かつ効率的に警備を行う「運航安全管理システム(以下、本システム)」の実証をおこなった。本システムを用いることで、有人機と無人機の運航情報を一元的に管理し、警備活動を安全かつ効率的に実施できることを実証することができた。さらに、警備中に発生した突発的な任務に対しても、迅速な運航調整が可能であることが示された。なお、本実証は、2025年4月に採択された「Kプロ運航安全管理技術」の研究開発プロジェクトの一環として実施されたもの。
背景と目的
本実証は、内閣府が主導する「経済安全保障重要技術育成プログラム(K Program)」のうち、2025年4月に採択された「Kプロ運航安全管理技術(災害・緊急時等に活用可能な小型無人機を含めた運航安全管理技術)」(以下、本プロジェクト)の研究開発の一環として実施された。
これまで、有人機と無人機の運航は異なるシステムで管理されており、大規模イベントなどの現場においても、両者を一元的に運用することが困難であった。その結果、有人機・無人機の双方を対象としたリアルタイムの監視や、警備活動中に発生する突発的な任務への柔軟な対応が課題となっていた。こうした背景を受けて、本プロジェクトでは、有人機・無人機の運航を統合的に運用・管理するシステムの研究開発が進められている。
今回の実証では、大阪・関西万博のような大規模イベントの警備任務を想定し、万博開催期間中に、会場周辺エリアにおいてシミュレーションを実施し、本システムの有効性を検証した。
本実証について
<概要>
大阪・関西万博において、有人機・無人機による大規模イベントの警備を実施するという想定のもと、「運航調整所」が設置されたと仮定し、本システムを用いた「運航調整所業務」についての有効性を確認した。評価にあたっては、省庁や自治体など、今後本システムの利用が想定される候補者が実施した。
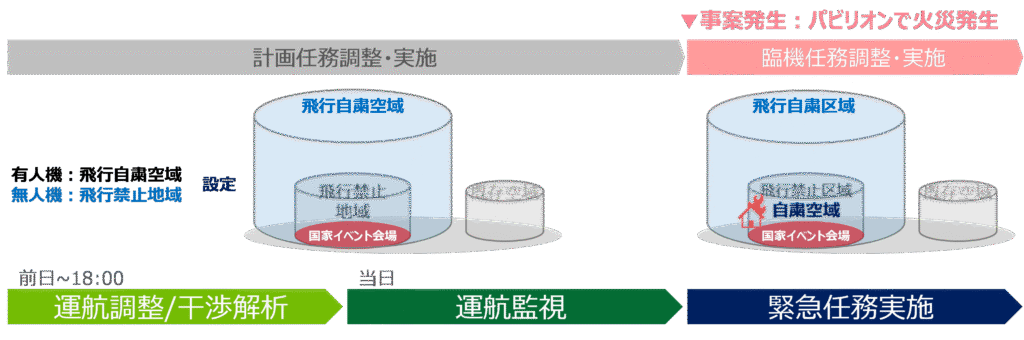
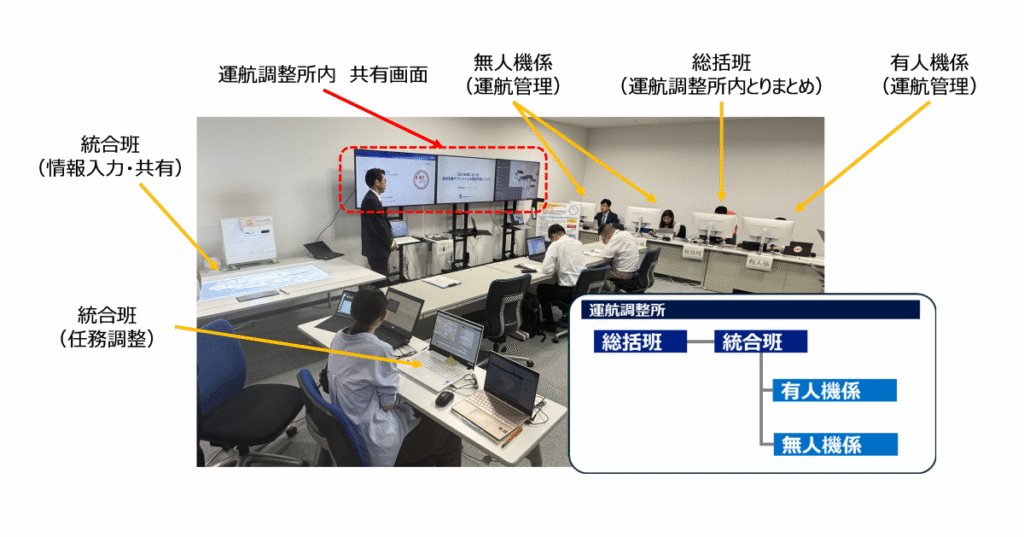
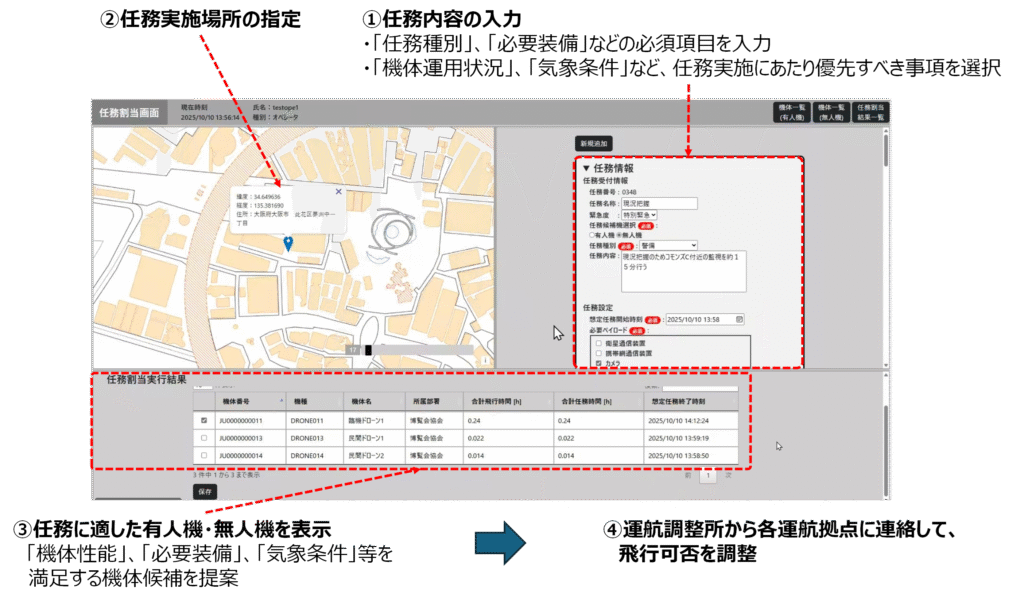
「運航調整所」では、有人機・無人機が飛行する前日の調整から、飛行当日の運航監視、当日に発生した緊急任務を有人機・無人機に割り当てる対応(任務割当)までを一連の流れとして想定し、これらの業務を対象とした実証シナリオを設定した。(図1、図2)
本実証において、警備活動中に臨時に発生した緊急任務への対応は、実機への影響を考慮して仮想データを使用した(図3)。また、次世代エアモビリティの社会実装に向けた実現プロジェクトである「ReAMoプロジェクト」と連携し、同万博で飛行した空飛ぶクルマ(eVTOL)の運航情報も共有できる体制を構築した。(図4)

<テラドローンの役割>
テラドローンは、任務割当を受けた無人機が安全かつ効率的に運航するため、無人機の運航制御および無人機の飛行データなどを提供する役割を担った。
- 無人機の飛行計画や位置情報の管理
- 割り当てられた任務を、無人機を飛行させるオペレータに連携
- 安全な飛行を支援する機能をオペレータに提供
本実証では、最大12機の無人機を同時に運用・管理することに成功し、有人機や無人機が多数飛行する同一空域において、無人機の安全かつ確実な任務の遂行を支援した。
今後の展望
今回の実証結果を災害対応にも活かすため、今後は省庁や自治体が実施する防災訓練などを通じてさらなる実証を進め、本システムの機能強化・改善を進めていく。
※出典元:Terra Drone株式会社 PR TIMESより
https://prtimes.jp/main/html/rd/p/000000396.000020194.html